Промышленное оборудование
Автоматизация
Сборка, монтаж, наладка
 Прием звонков
Прием звонков
Пн-Пт: 9:00 - 17:00
Сб: Выходной
Вс: Выходной
В современном производстве процент применения асинхронных двигателей с короткозамкнутым ротором достигает 80-90%. Такой большой процент использования асинхронных машин обусловлен простотой конструкции, ремонтопригодности относительно невысокой стоимости, простоты замены и унификации при замени одного производителя на другого.
Сама теория работы асинхронной машины была изложена еще Никола Тесла в 1888 году. Краткая статья изложенная в английском научном журнале попала на глаза русскому изобретателю Михаилу Осиповичу Доливо-Добровольскому. И уже в 1889 году он получил патент на трехфазный асинхронный двигатель, спустя пару лет в Англии и Германии был запатентован двигатель с фазным ротором.
Асинхронный двигатель имея ряд положительных преимуществ для применения в производстве, промышленности, сельском хозяйстве и других отраслях жизнедеятельности, так же имеет и свои недостатки. Одним из основных это сложность регулирования оборотов двигателя.
Сам принцип частотного регулирования асинхронного двигателя был изложен еще в 30 годах. Но из-за сложности технической реализации, и существующей на тот момент слабой материальной базы в области силовых ключей отлаживался на более поздний период. И вот с бурным развитием IGBT силовых транзисторов и тиристоров разработчик смогли вернуться к теме ЧАСТОТНОГО РЕГУЛИРОВАНИЯ.
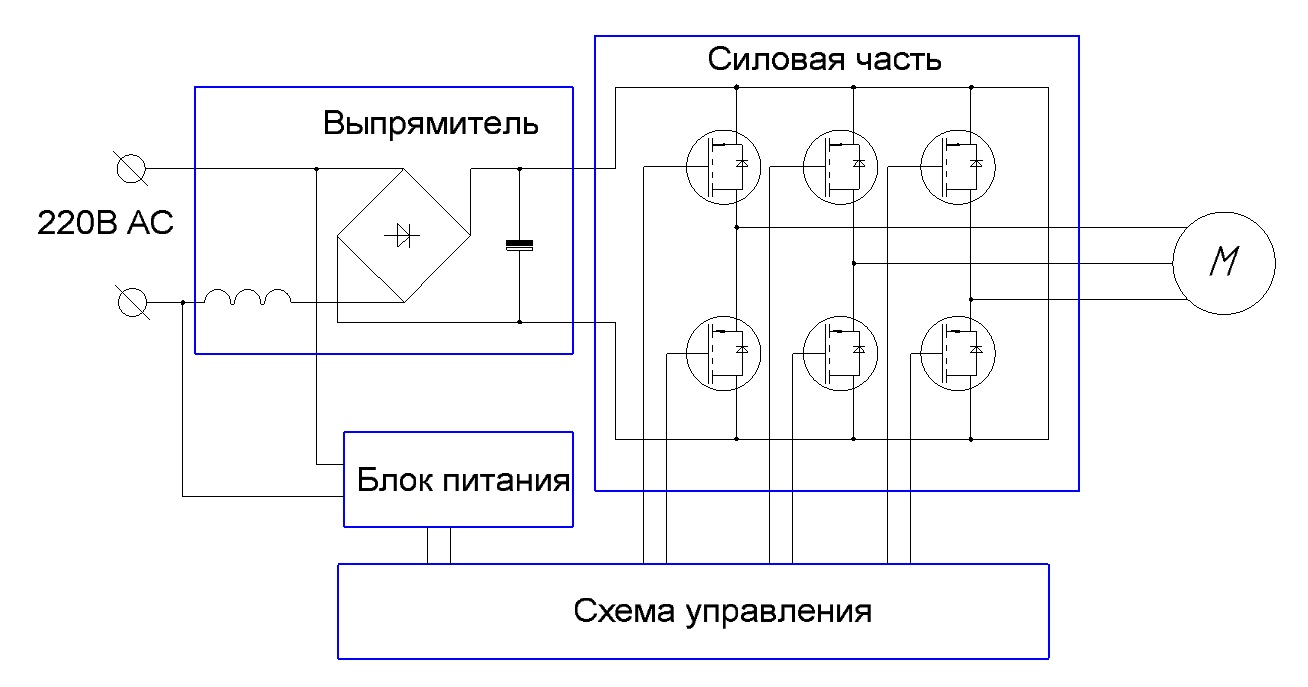
Частотный преобразователь как устройство в целом выпускаемые разными фирмами производителями мало чем отличаются друг от друга по схемотехнике построения, поскольку сам принцип работы и управления асинхронным двигателем не меняется. И состоит из нескольких блоков – собственно выпрямителя (преобразователя переменного напряжения с постоянное), звена постоянного тока, и самого преобразователя, еще называемого инвертором (преобразуя постоянный ток в переменный с заданной частотой)

Большой процент асинхронных двигателей составляют 3х – фазные двигатели, рассчитанные на стандартное напряжение нашей сети 380-400В переменного тока. Работа и применеие двигателей однофазных как правило не оправдано, и создает перекосы сети особенно при больших нагрузках.
Сами частотные преобразователи делятся по типу управления двигателем на векторные и скалярные. Как правило, применение векторного преобразователя частоты необходимо в тех устройствах, где отслеживание момента на валу, частоты вращения двигателя должно быть в довольно жестких пределах. Моменты же где в этом нет необходимости пример - вентиляция,вполне допустимо применение частотных преобразователей, реализованных на принципе скалярного управления.
Частым случаем является попытка применения 3х фазного электродвигателя в однофазной сети. Все попытки и «ухищрения» заставить двигатель нормально работать оборачиваются либо материальными затратами, либо проблемам при запуске, потерей крутящего момента и т.д. не говоря уже о банальном перегреве обмоток. Для таких случаев были разработаны частотные преобразователи для работы с однофазным питанием. Принцип работы таких преобразователей аналогичен трехфазным, с одним лишь условием что - на выходе данного «частотника» в схеме эмулируется работа для 3х фазной нагрузки с напряжением питания 3*220 В АС.

Тот же самый выпрямитель, звено постоянного тока и сам инвертор (преобразователь частоты). Основными двумя схемами подключения электродвигателя являются схемы звезда и треугольник. Если двигатель рассчитан на подключение по схеме звезда на 380-400 В, то подключая его по схеме треугольник нужно подавать на клеммы обмоток 3*220 В.
Отдельной позицией стоят частотные преобразователи для управления однофазных асинхронных двигателей. Широкого распространение эти двигатели не получили в виду малого пускового момента и низкого КПД. Принцип работы частотного преобразователя для данных двигателей по сути «обрезанная» версия 3х фазного преобразователя для управления по двум обмоткам двигателя – рабочей и обмотки запуска.
Основной особенностью однофазных частотных преобразователей является скалярная система управления, поскольку реализация векторного режима требует сложных преобразований внутри самого частотника. Несмотря на это, возросшие вычислительные способности современных процессоров и их постоянно снижающаяся цена позволяет переложить ряд сложных математических вычислений происходящих на выходе частотника на плечи CPU, тем самым реализовать ряд функций до этого не возможных в скалярном режиме работы. Например - работу с функцией управления по потокосцеплению, режим (FCC) , что по своей сути приближает простой скалярный частотный преобразователь по функциональности к векторному.
По всем остальным функциональным потребностям, «младшие братья» ничем практически не уступают своим «старшим» аналогам, и при правильном подходе на этапе проектирования, или замены оборудования, могут с успехом применятся в производстве.
Спасибо!
Ваш комментарий отправлен!






